黄杰, 2013-06-15
root[a]linuxsand.info
tags: robotics
原书目录:
当末端执行器与操作臂工作环境发生碰撞时,纯粹的位置控制已经不适用了。
大多数工业机器人应用于相对简单的场合:点焊、喷涂、抓取、放置。工业机器人下一个大量应用的场合会是在装配线作业中执行一个或多个零件的装配任务。在这种零件装配任务中,接触力的监控非常重要。
给机械手装上传感器,以给出操作任务的状态信息,使得机器人完成装配任务。不错目前操作臂的灵巧性较低,限制了它们在自动化装配领域的应用。
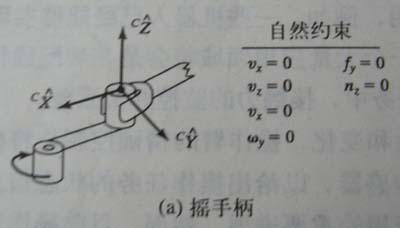
图 a 中约束坐标系固连在手柄上并随手柄运动,规定 X 方向总是指向手柄的轴心。作用于指端的摩擦力确保能够可靠地抓住把手,该把手在一个心轴上,且能够相对于手柄转动。
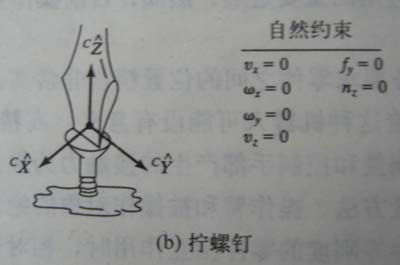
图 b 中约束坐标系固连在螺丝刀的末端,工作时随螺丝刀一起转动。在 Y 方向,力约束为零,因为螺钉上的槽允许螺丝刀在该方向滑动。
上面两个例子中,给定的约束集在整个任务中保持不变。对于更为复杂的情况,任务被分解成子任务,对于这些子任务,可以确定一个不变的自然约束集。
在大多数情况下,将位置约束定义为「速度为零」的约束,可能更为简单。
「附加约束」,又称为「人工约束」,是按照自然约束确定的期望运动或施加的力来定义的。
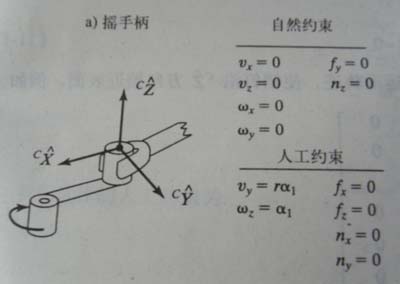
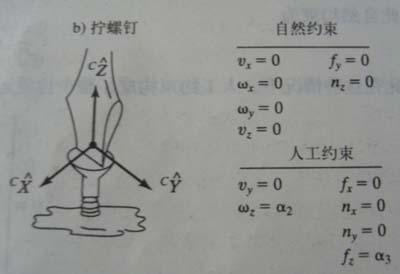
当给定自然约束在坐标系{C}中的特定自由度时,也应给定人工力约束,反之亦然。在任意瞬时,通过控制约束坐标系中的给定自由度以满足位置约束或力约束。
「装配策略」是指一个事先规划好的人工约束序列,并按照要求的方式完成这个作业。其中必须包含检测手段,使得系统能够检测接触状态的变化,以便跟踪自然约束的变化。

必须解决三个问题:
对一个自由度进行严格的位置或力控制是在伺服刚度频谱的高端和低端进行的。理想的位置伺服刚度为无穷大,可抑制所有作用于系统的干扰力;理想的力伺服刚度为零,可保持期望的作用力,不收位置变化的干扰。
Draper 开发的 RCC(微偏心柔顺装置)。它是一个具有六自由度的弹簧,安装在操作臂的腕部和末端执行器之间。
使操作臂能够检测到与表面的接触,并使用力检测来完成某些动作。如:检测到力以前,以位置控制方式运动;检测到力以后,停止运动。
某些工业机器人在末端执行器上配备力传感器,通过编程使操作力超过阈值时停止运动或执行其它运动,或检测抓取物体的重量。