黄杰, 2013-06-06
root[a]linuxsand.info
tags: robotics
原书目录:
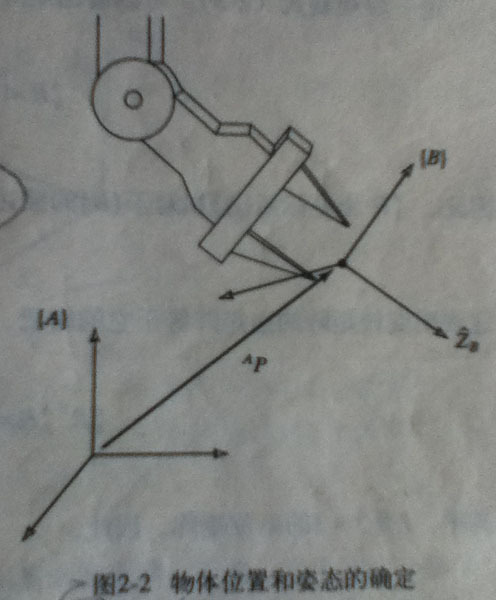
讨论任何问题可以参照的坐标系。
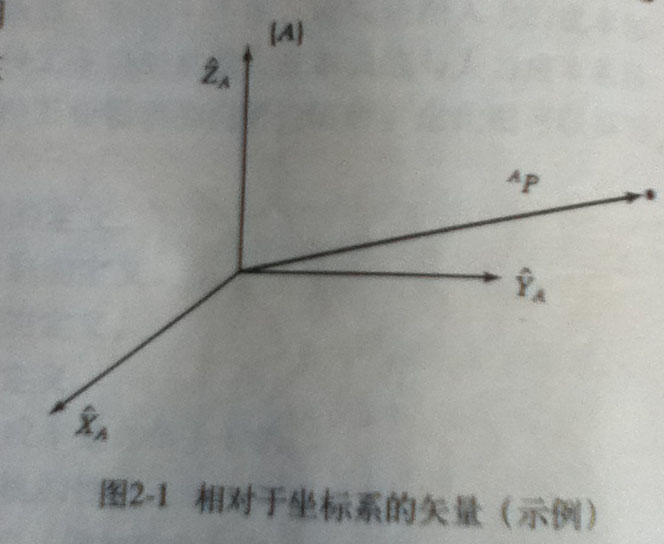
用 3 x 1 的位置矢量对世界坐标系中的任何点进行定位。
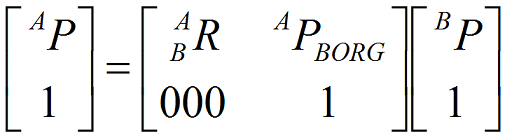
位置矢量用一个前置的上标来表明其参考的坐标系。或者用矩阵来表示:

在物体上固定一坐标系并给出此坐标系相对于参考系的表达。
{B} 相对于 {A} 中的描述 -> 姿态旋转矩阵

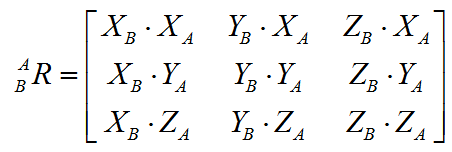
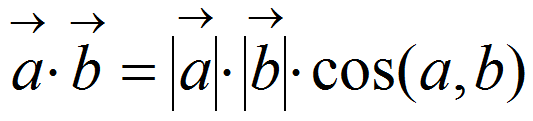
旋转矩阵的各分量:方向余弦
由于位置和姿态经常成对出现,我们将此组合成为「坐标系」。4 个矢量为一组,表示了位置和姿态信息。
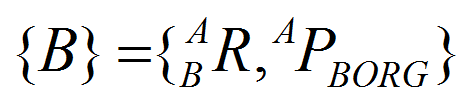
其中,APBORG 是确定 {B} 的原点的位置矢量。
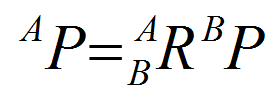
可用矢量相加的方法求点 P 相对于 {A} 的表示 AP。
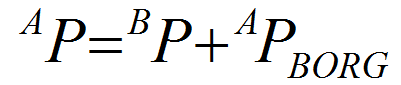
过程在 P18,结果的简化形式:
齐次变换矩阵
简洁形式(用于公式推导):
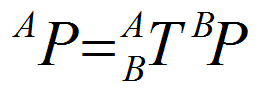
用于坐标系间点的映射的通用数学表达式。
具体略过。
齐次变换矩阵:
「坐标系」和「变换」都可用「位置矢量 + 姿态」来描述。一般来说,「坐标系」主要用来描述,「变换」主要用来表示映射或算子。
(略过 2.6 变换算法,2.7 变换方程,2.8 姿态的其它描述方法,2.9 自由矢量的变换,2.10 计算分析)
附,机器人系统的示教和预定义姿态运动。