黄杰, 2013-06-13
root[a]linuxsand.info
tags: robotics
原书目录:
严格地讲,线性控制技术仅适用于能够用线性微分方程进行数学建模的系统(操作臂的动力学方程一般式非线性微分方程)。但这种近似是可行的,是当前工程中最常用的方法。
我们希望操作臂关节沿着指定的位置轨迹运动,而驱动器是按照扭矩的指令运动,因此我们必须应用某种控制系统计算出适当的驱动指令去实现。这些期望的扭矩主要是由关节传感器的反馈计算出来的。
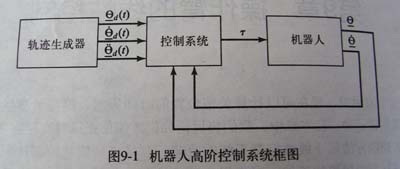
上图是轨迹生成器与机器人的关系。机器人从控制系统接收到一个关节扭矩矢量,操作臂传感器允许控制器读取关节位置矢量、关节速度矢量。
建立一个高性能的控制系统的唯一方法就是利用关节传感器的反馈。这个反馈一般是通过比较期望位置和实际位置之差以及期望速度和实际速度之差来计算伺服误差。这种系统叫做「闭环系统」。
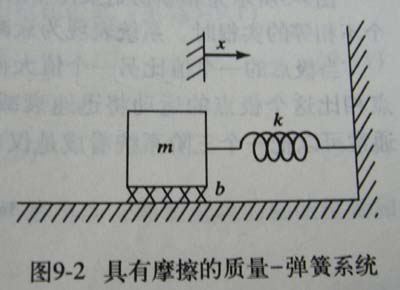
上图是一个简单的机械系统,这个单自由度的开环动力学问题可以由一个二阶线性常系数微分方程来描述。它的解 x(t) 是关于时间的函数,确定了质量块的运动。方程的解取决于质量块的初始条件,即初始位置和初始速度。
对于解的讨论,略。
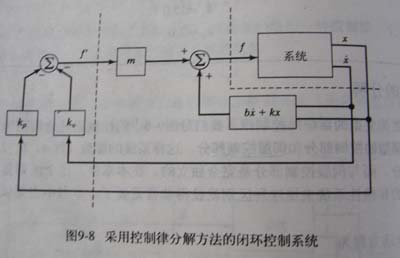
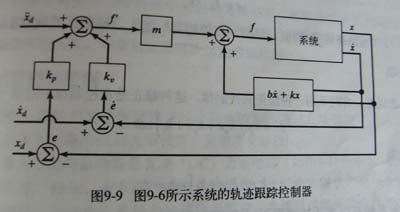
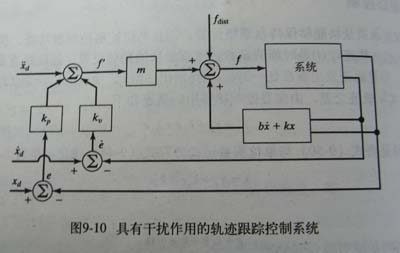
为了设计更为复杂的系统的控制律,把控制器分为「基于模型的控制部分」和「伺服控制部分」。
略。
控制系统的一个作用就是提供抗干扰的能力。
前面的讨论中都是假定控制计算机完成控制律的时间为 0。实际情况是,计算都是需要一定时间的。若使选择的伺服(或采样)速度足够快则需要考虑以下几点:
为单一旋转关节操作臂建立一个简单的模型。过程不赘述,需要会详细重看。几个步骤(注意点):
以 Unimation PUMA 560 为例。硬件结构分为两个层次,一台 DEC LSI-11 计算机作为上层「主控」计算机输出指令到 6 个 Rockwell 6503 微处理器。每一个微处理器采用 PID 控制律控制一个独立关节。
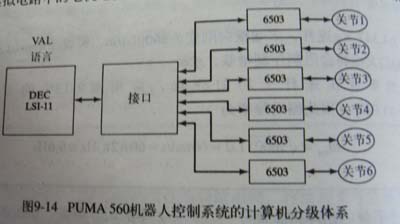
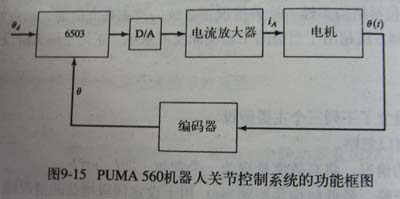
LSI-11 计算机每 28ms 发送一个新的位置指令(定位点)到关节微处理器。关节微处理器的运行周期为 0.875 ms。在这个周期内,微处理器进行期望位置定位点的差补运算,计算伺服误差,计算 PID 控制律以及向电机发送一个新的力矩值。
LSI-11 计算机执行整个控制系统的所有「高级」操作。首先,计算机需要对 VAL(Unimation 机器人编程语言)程序指令逐句进行编译。在进行运动指令的编译时,LSI-11 计算机执行必要的逆运动学计算,进行期望轨迹规划,并且每 28ms 为关节控制器生成一组路径点轨迹。
PUMA 560 系统允许用户通过示教盒按增量方式让机器人在关节坐标系或笛卡尔坐标系中运动。