黄杰, 2013-06-05
root[a]linuxsand.info
tags: robotics
原书目录:
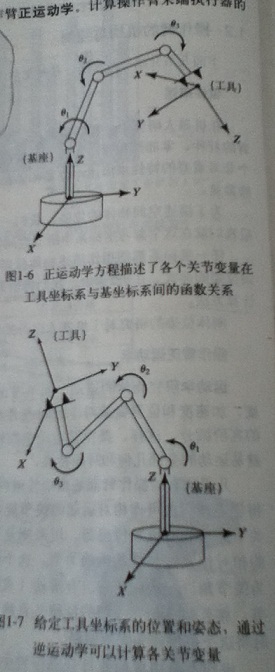
需要 6 个变量来描述,3 for 位置,3 for 姿态。
从关节空间速度向笛卡尔空间速度的映射。会随着操作臂位形的变化而变化。
在奇异点,雅可比矩阵不可逆。
i.e. 老式战斗机后座舱机枪手,2 个自由度(仰角、方位角)
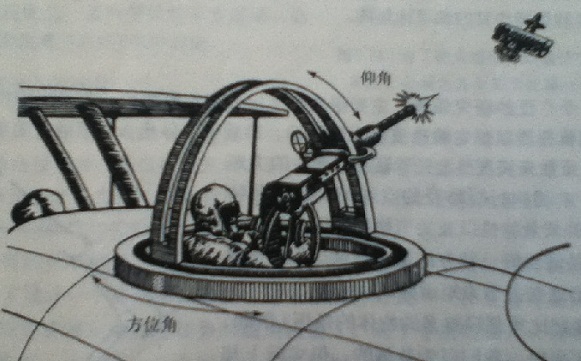
头顶仅剩一个自由度(仰角),「局部退化」。
通过「关节驱动器产生复杂的力矩函数」来达到「末端执行器 - 加速 - 匀速 - 减速 - 停止」的效果。
通过「动力学方程」(一种可用的方法)来达到「控制操作臂路径」的效果。
平稳运动?各关节同时开始、停止即可。
路径是怎样的?知道终点,中间点(路径点)。 -> 样条函数
是对位置控制(线性、非线性)的补偿。
操作点(工具中心点 TCP)